As we already mentioned in §4.2.3, a bidirectional delay line can be thought of as a discrete-time description of traveling wave propagation in a uniform transmission line. Thus a single waveguide, which is in itself no more than a pair of delay lines, can be used to model an uninterrupted stretch of a tube or string, without requiring any machine arithmetic. Scattering occurs only at the ends of the waveguide, and in fact, it is possible to use bidirectional delay lines to model wave propagation even in lossy [160] or dispersive [199] media by consolidating these effects at the terminations. If the length of the string or tube does not correspond to an integer number of delays at a given sample rate, then it is possible to employ fractional delay lines [114,195], which approximate non-integer delay lengths using all-pass (lossless) filters![]() .
.
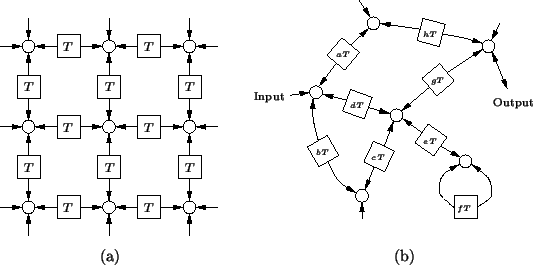
Digital waveguide networks have also been used to simulate wave motion in higher dimensions, in which case they are sometimes called waveguide meshes [198,200]; cases of particular interest have been (2+1)D meshes (see §1.1.2) used to simulate the vibration of a uniform membrane [67], and (3+1)D meshes used to model acoustic spaces [156]. Many different types of mesh have been proposed; they differ chiefly in their numerical dispersion properties [157], and we will analyze these forms in detail in Appendix A. A good deal of recent work has gone into the problem of correcting numerical dispersion by introducing terminating filters at the boundaries, and by using interpolation and frequency warping techniques [157]. A (2+1)D rectilinear mesh is shown in Figure 4.6(a). Unit-sample bidirectional delay lines (here represented by two-headed arrows) are connected to scattering junctions (white circles) located at the nodes of a rectangular lattice. Such a mesh has been used to model drum heads as well as gongs (where a nonlinear mesh termination has been applied) [197]. We mentioned in §1.1.2 that this mesh indeed solves the (2+1)D wave equation numerically [198]. We will elaborate on this idea extensively throughout the rest of the chapter.
Waveguide networks have also been used in a quasi-physical manner in order to effect artificial reverberation [163]. In this case, an unstructured network of waveguides of possibly time-varying impedance is used; such a network is shown in Figure 4.6(b), where the number of samples of delay in each waveguide (integers ![]() through
through ![]() ) may be different. Such networks are passive, so that signal energy injected into the network from a dry source signal will produce an output whose amplitude will gradually attenuate, with frequency-dependent decay times dependent on the delays and immittances of the various waveguides--some of the delay lengths can be interpreted as implementing ``early reflections.''[163]. Such networks provide a cheap and stable way of generating rich impulse responses. Generalizations of waveguide networks to feedback delay networks (FDNs) [149] and circulant delay networks [150] have also been explored, also with an eye towards applications in digital reverberation.
) may be different. Such networks are passive, so that signal energy injected into the network from a dry source signal will produce an output whose amplitude will gradually attenuate, with frequency-dependent decay times dependent on the delays and immittances of the various waveguides--some of the delay lengths can be interpreted as implementing ``early reflections.''[163]. Such networks provide a cheap and stable way of generating rich impulse responses. Generalizations of waveguide networks to feedback delay networks (FDNs) [149] and circulant delay networks [150] have also been explored, also with an eye towards applications in digital reverberation.
 |
We will call these DWNs used for reverberation unstructured; by this we mean that the waveguides and scattering junctions are not necessarily arranged according to a regular grid in any coordinate system. Yet such a network is, by construction, passive. This contrasts sharply with the MDWD networks discussed in the previous chapter. In that case, discretization is performed through the use of a spectral mapping or integration rule; implicit in such an approach is that the algorithm operates on a regular grid in some system of coordinates (and the same will be true of the DWNs that are derived through an MDWD-like discretization procedure, as will be discussed in §4.10). The reason for this is that the DWN, as we have described it in this section, is essentially a large network of lumped elements, whereas the MDWD network is a multidimensional object. In certain cases (see §4.9), unstructured DWNs may come in handy.
