Next: Digital Waveguide Networks
Up: Multidimensional Wave Digital Filters
Previous: Extension to (2+1)D
Higher-order Accuracy
WDF-based numerical methods are, in general, second-order accurate in both the time step and the grid spacing. In all the schemes that have been examined in the literature, these quantities occur in a fixed ratio (usually written as  ), so we can say that such schemes are accurate to second order in either one (or of any of the shift lengths in the new coordinates). A numerical approximation to a system of PDEs obtained using a MDWD network will converge to the solution to the model problem with a truncation error [176] proportional to the square of any of these spacings.
), so we can say that such schemes are accurate to second order in either one (or of any of the shift lengths in the new coordinates). A numerical approximation to a system of PDEs obtained using a MDWD network will converge to the solution to the model problem with a truncation error [176] proportional to the square of any of these spacings.
While this is true in general, in this section we would like to point out that it is indeed possible to devise MD circuit-based schemes which exhibit a higher-order spatial accuracy. Temporal accuracy, however, remains fixed at second-order ; for this reason, such schemes must operate using a small time step; this limits their usefulness somewhat. Even more importantly, however, we note that the schemes we will develop here can be rewritten as very simple finite difference schemes of the form corresponding to digital waveguide networks (to be discussed in Chapter 4). We include this section merely to show that higher-order spatial accuracy is not incommensurate with MD-passivity, and to indicate a possible direction for future research.
; for this reason, such schemes must operate using a small time step; this limits their usefulness somewhat. Even more importantly, however, we note that the schemes we will develop here can be rewritten as very simple finite difference schemes of the form corresponding to digital waveguide networks (to be discussed in Chapter 4). We include this section merely to show that higher-order spatial accuracy is not incommensurate with MD-passivity, and to indicate a possible direction for future research.
Consider again the lossless source-free transmission line problem, defined by
 |
(3.96a) |
(Losses and sources may be reintroduced at a later stage in these schemes without any difficulty.) Because higher-order spatially accurate explicit methods will require access to grid points other than nearest neighbors, we introduce the following coordinate transformation,
 |
(3.97) |
for some positive integer  (if
(if  , then we get the coordinate transformation defined by (3.18), scaled by a constant factor).
, then we get the coordinate transformation defined by (3.18), scaled by a constant factor).  will shortly be shown to be the order of spatial accuracy of the resulting difference scheme.
As before, we have
will shortly be shown to be the order of spatial accuracy of the resulting difference scheme.
As before, we have
with
![$ {\bf u} = [x, t]^{T}$](img1065.png) , and
, and
![$ {\bf t} = [t_{1^{+}}, t_{1^{-}}, t_{2^{+}}, t_{2^{-}}, \hdots, t_{q^{+}}, t_{q^{-}}]^{T}$](img1066.png) ; the coordinate transformation defined by
; the coordinate transformation defined by  thus describes an embedding of the (1+1)D problem in a -dimensional space. A uniform sampling of the new coordinates with spacings
thus describes an embedding of the (1+1)D problem in a -dimensional space. A uniform sampling of the new coordinates with spacings
 merely regenerates a uniform grid with spacing
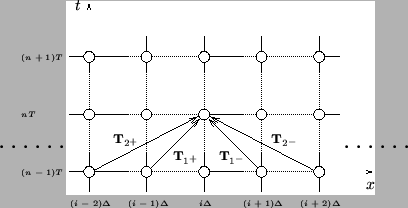
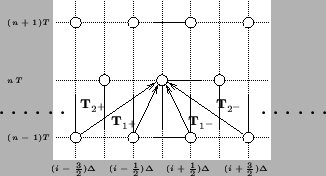
merely regenerates a uniform grid with spacing  . The first two pairs of unit shifts are as shown in Figure 3.24.
. The first two pairs of unit shifts are as shown in Figure 3.24.
Figure:
Unit shifts in the coordinates defined by (3.94).
 |
We now rewrite system (3.93) as
where, as before, we have  ,
,
 for some positive constant
for some positive constant  , and
, and
 . The
. The
 ,
,
 , are constants which satisfy
, are constants which satisfy
 |
(3.98) |
We may continue and write
Because, from (3.25), we have that
we can immediately write
 |
(3.99a) |
with
 |
(3.100) |
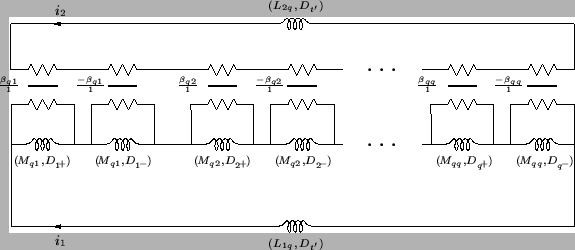
The system (3.96) can immediately be identified with an MDKC, as in Figure 3.25.
Figure:
MDKC for the lossless source-free transmission line equations, according to the decomposition given by (3.96).
 |
Each of the Jaumann two-ports can be discretized according to the trapezoid rule; as long as our choice of the constants
satisfies the constraint (3.95) and  and
and  remain positive, the resulting MDWD network will be a second-order stable accurate approximation to system (3.93). Suppose, however, that we apply a different set of discretization rules, namely
remain positive, the resulting MDWD network will be a second-order stable accurate approximation to system (3.93). Suppose, however, that we apply a different set of discretization rules, namely
 |
(3.101a) |
for
. Here,
 and
and
 are the shift operators in the directions
are the shift operators in the directions  and
and  defined by
defined by
for a function
 , where
, where
 and
and
 are vectors of length in directions and respectively (see Figure 3.24 for a graphical representation of these shifts on the computational grid). These rules correspond, in the linear shift-invariant case, to pairs of spectral mappings of the type mentioned briefly in §3.5.4, with shift lengths equal to ; they are also MD-passivity preserving, and are in general second-order accurate [61]. To the scaled time derivative, we apply the trapezoid rule with a doubled time step
are vectors of length in directions and respectively (see Figure 3.24 for a graphical representation of these shifts on the computational grid). These rules correspond, in the linear shift-invariant case, to pairs of spectral mappings of the type mentioned briefly in §3.5.4, with shift lengths equal to ; they are also MD-passivity preserving, and are in general second-order accurate [61]. To the scaled time derivative, we apply the trapezoid rule with a doubled time step
 , as defined by
, as defined by
Equation (3.96a) then becomes
Because, however,
 and our system is time-invariant, the operator
and our system is time-invariant, the operator
 commutes with and
commutes with and  and may be factored out of (3.99), giving
and may be factored out of (3.99), giving
which can be further simplified to
or, writing
 and
and
 where
where
 is a simple shift in the
is a simple shift in the  direction of , as
direction of , as
which is easily seen to be a simple difference approximation to (3.93a), The approximation is nominally second-order accurate in , but we have not as yet made any special choice of the
. This can be done via a conventional finite difference approach [176] in such a way as to yield a higher-order accurate approximation to the spatial derivative.
We can write, expanding the shift operators in Taylor series,
There are degrees of freedom, corresponding to the parameters
,
. We require, from (3.95) that the coefficient of the first derivative on the right-hand side of (3.100) equal one. We may then additionally require that the other coefficients, for
 be zero; the resulting difference approximation will then be accurate to order .
This yields the linear system
be zero; the resulting difference approximation will then be accurate to order .
This yields the linear system
where  is a
is a  matrix with
matrix with
![$ [{\bf C}_{ij}] = j^{2(i-1)}$](img1112.png) ,
, 
![$ _{q} = [\alpha_{q1},\hdots,\alpha_{qq}]^{T}$](img1113.png) , and
, and
 is a
is a  vector whose first entry is one, and whose others are zero. is always full rank, so there is a unique solution for any . The same
vector whose first entry is one, and whose others are zero. is always full rank, so there is a unique solution for any . The same  will also give a higher-order approximation to (3.93b), and thus system (3.93) will be approximated to higher-order accuracy as a whole. For a fourth-order approximation, for example, we obtain
will also give a higher-order approximation to (3.93b), and thus system (3.93) will be approximated to higher-order accuracy as a whole. For a fourth-order approximation, for example, we obtain
![$ _{2}= [4/3,-1/3]^{T}$](img1117.png) , and for a sixth-order approximation, we get
, and for a sixth-order approximation, we get
![$ _{3}= [3/2, -3/5, 1/10]^{T}$](img1118.png) . These values completely determine the MDKC pictured in Figure 3.25.
. These values completely determine the MDKC pictured in Figure 3.25.
The passivity requirement is, as before, a condition on the positivity of and . Choosing
 gives
gives
 |
 |
 Fourth-order accurate scheme Fourth-order accurate scheme |
|
|
|
 Sixth-order accurate scheme Sixth-order accurate scheme |
|
It is interesting to note that in the constant-coefficient case, this bound is distinct from the stability bound obtained from Von Neumann analysis (see Appendix A) applied to the same difference method. For example, for the fourth-order accurate scheme defined by  , the stability bound is
, the stability bound is
 , with
, with
 ; there is thus a range of values of for which the scheme will be stable, but not MD-passive. We will comment extensively on the distinction between passive and stable methods in Appendix A.
; there is thus a range of values of for which the scheme will be stable, but not MD-passive. We will comment extensively on the distinction between passive and stable methods in Appendix A.
It is also of interest to define a similar scheme with respect to the coordinate transformation defined by
 |
(3.107) |
Keeping the same notation for the new coordinates, the shifts are as shown in Figure 3.26; now we have a grid ideal for a staggered or interleaved algorithm, with alternating grid points at alternating time steps.
Figure:
Unit shifts in the coordinates defined by (3.102).
 |
For this coordinate system, we follow through a development very similar to that in the previous pages. We again have an MD circuit representation as in Figure 3.25, where now we have
for some set of
,
which sum to unity. The symbols  and
and  in the figure now refer to directional derivatives in the coordinate directions defined by (3.102). For higher-order accuracy, constraint equation (3.101) will apply, now with
in the figure now refer to directional derivatives in the coordinate directions defined by (3.102). For higher-order accuracy, constraint equation (3.101) will apply, now with
![$ [{\bf C}_{ij}] = (j-1/2)^{2(i-1)}$](img1132.png) . For fourth-order accuracy, we obtain
. For fourth-order accuracy, we obtain
![$ _{2}= [9/8, -1/8]^{T}$](img1133.png) , and for a sixth-order approximation, we get
, and for a sixth-order approximation, we get
![$ _{3}\approx [1.179, -0.195, 0.0234]^{T}$](img1134.png) .
.
Because here we are using an alternative discretization rule, the resulting MDWD networks are more appropriately discussed in the context of digital waveguide networks (which are the subject of the next chapter). We will return briefly to waveguide network representations of these higher-order accurate methods in §4.10.5.
Next: Digital Waveguide Networks
Up: Multidimensional Wave Digital Filters
Previous: Extension to (2+1)D
Stefan Bilbao
2002-01-22