Next: Phase and Group Velocities
Up: Applications in Vibrational Mechanics
Previous: The Naghdi-Cooper System II
Elastic Solids
The system defining the behavior of a (3+1)D linear, isotropic, elastic solid is somewhat easier to handle numerically than the (2+1)D plate and (1+1)D beam systems which are derived from it; the physics is less obscured by modeling assumptions. Numerical simulation of the full (3+1)D system is, of course, much more computationally expensive.
Such a medium is characterized by its density,  , and two material parameters
, and two material parameters  and
and  , called the Lamé coefficients, which describe its resilience; there are two parameters because an solid will resist compressional and shear forces to different degrees. Other elastic parameters, which we have already made use of earlier in this chapter, can be defined in terms of these two constants. Young's modulus
, called the Lamé coefficients, which describe its resilience; there are two parameters because an solid will resist compressional and shear forces to different degrees. Other elastic parameters, which we have already made use of earlier in this chapter, can be defined in terms of these two constants. Young's modulus  and Poisson's ratio
and Poisson's ratio  can be written as
can be written as
We remark that is the same as  that was used in the treatment of the Timoshenko beam (see §5.2), the Mindlin plate (see §5.4), and the Naghdi-Cooper shell model of §5.5.2. For the sake of generality, we allow all these parameters to be functions of
that was used in the treatment of the Timoshenko beam (see §5.2), the Mindlin plate (see §5.4), and the Naghdi-Cooper shell model of §5.5.2. For the sake of generality, we allow all these parameters to be functions of  ,
,  and
and  .
.
The equations of motion of the solid can be written in terms of stress and displacement fields [77]. There are nine stresses:
 ,
,
 and
and
 are normal stresses in the direction indicated by the double subscript, and
are normal stresses in the direction indicated by the double subscript, and
 ,
,
 ,
,
 ,
,
 ,
,
 , and
, and
 are shear stresses. The displacements of a point in the medium from its equilibrium position are given by
are shear stresses. The displacements of a point in the medium from its equilibrium position are given by
![$ {\bf d} = [w_{x},w_{y},w_{z}]^{T}$](img2645.png) . If the material is assumed to be in rotational equilibrium, then we have
. If the material is assumed to be in rotational equilibrium, then we have
so that there are a total of six independent stresses acting at a given point in the solid [190].
Newton's Laws for a solid (neglecting body forces) are written as
 |
(5.54a) |
The stress-strain relation, or Hooke's Law [77] is expressed as a linear proportionality between the six stresses and spatial derivatives of the displacements (the strain):
 |
(5.55a) |
|
 |
(5.56a) |
|
The systems (5.52), (5.53) and (5.54) taken together are sometimes called the Navier system [77,131]. By introducing velocities defined by
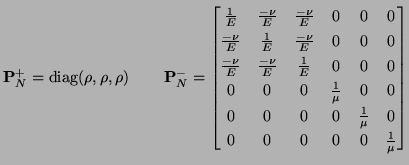
it is possible to manipulate these equations into the symmetric hyperbolic form of (3.1), with
![$ {\bf w} = [v_{x}, v_{y}, v_{z}, \sigma_{xx},\sigma_{yy},\sigma_{zz},\sigma_{xy},\sigma_{xz},\sigma_{yz}]^{T}$](img2651.png) , and
, and
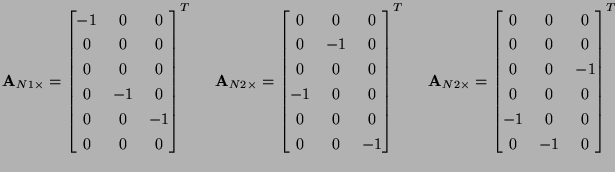
with
and
Subsections
Next: Phase and Group Velocities
Up: Applications in Vibrational Mechanics
Previous: The Naghdi-Cooper System II
Stefan Bilbao
2002-01-22