Next: The Naghdi-Cooper System II
Up: Cylindrical Shells
Previous: Cylindrical Shells
The Membrane Shell
The simplest type of cylindrical shell theory is the membrane shell formulation of Rayleigh [77]. In this very basic theory, the shell is assumed to behave somewhat like a membrane, in that the restoring stiffness is assumed negligible. The shell is assumed to lie parallel to the  axis, and has radius
axis, and has radius  . We define
. We define
 , where
, where  is the angular coordinate. This theory models the displacement of the shell from its equilibrium position; in contrast to Mindlin's plate system, however, displacements in all three directions are modeled as a function of time, and we will write these three displacements as
is the angular coordinate. This theory models the displacement of the shell from its equilibrium position; in contrast to Mindlin's plate system, however, displacements in all three directions are modeled as a function of time, and we will write these three displacements as  (transverse),
(transverse),  (axial) and
(axial) and
 (tangential). In the membrane theory, the three displacements complemented by three in-surface stresses
(tangential). In the membrane theory, the three displacements complemented by three in-surface stresses  (axial),
(axial),
 (tangential) and
(tangential) and
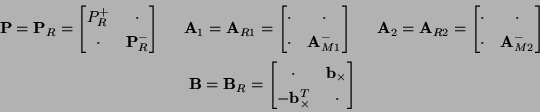
 (shear) form a closed system; bending moments and transverse shear stresses are not modeled. This system can be written as
(shear) form a closed system; bending moments and transverse shear stresses are not modeled. This system can be written as
 |
(5.48) |
|
 |
(5.49a) |
|
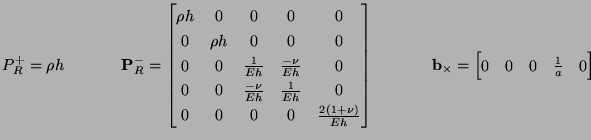
The material constants  ,
,  ,
,  and the shell thickness
and the shell thickness  are as discussed in §5.4, and are now assumed to be smooth functions of and
are as discussed in §5.4, and are now assumed to be smooth functions of and  . If we define the velocities
. If we define the velocities  ,
,
 and
and  by
by
then we again have a symmetric hyperbolic system of the form of (3.1) in the dependent variable
![$ {\bf w} = [v_{z}, v_{x}, v_{\theta}, n_{x}, n_{\theta}, n_{x\theta}]^{T}$](img2596.png) , where the system matrices are
, where the system matrices are
where
and
 and
and
 are as defined in (5.34) and (5.35). The lower 5 variable system described by
are as defined in (5.34) and (5.35). The lower 5 variable system described by
 ,
,
 and
, when uncoupled from the 1 variable system in
and
, when uncoupled from the 1 variable system in  is essentially equivalent to the lower subsystem in the Mindlin plate theory, except that our independent variables are now and instead of and
is essentially equivalent to the lower subsystem in the Mindlin plate theory, except that our independent variables are now and instead of and  . (In fact, if we replace any occurrence of
. (In fact, if we replace any occurrence of  in
in
 by , we get exactly
.) We thus expect the MDKC to be very similar to that of the right-hand network in Figure 5.16.
by , we get exactly
.) We thus expect the MDKC to be very similar to that of the right-hand network in Figure 5.16.
We again introduce current-like variables
and make use of coordinates defined by (3.22) in terms of the physical coordinates
![$ [x, \theta, t]^{T}$](img2608.png) .
.  ,
,  and
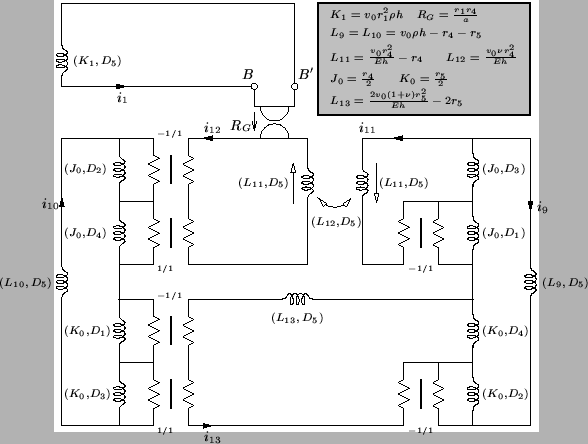
and  are, as before, positive constants which we will later use for optimization. The MDKC for the membrane shell system is shown in Figure 5.23. (We have marked the points
are, as before, positive constants which we will later use for optimization. The MDKC for the membrane shell system is shown in Figure 5.23. (We have marked the points  and
and  in the figure in anticipation of the shell model in the next section.)
in the figure in anticipation of the shell model in the next section.)
Figure 5.23:
MDKC for the cylindrical membrane shell system.
 |
Optimal settings for and , which follow from positivity constraints on the inductances
 , can be shown (through an analysis identical to that performed on the Mindlin plate system) to be
, can be shown (through an analysis identical to that performed on the Mindlin plate system) to be
in which case we must have, for passivity
 |
(5.52) |
The parameter is as yet unconstrained (notice that the inductance  is non-negative for any choice of
is non-negative for any choice of
 ).
).
We have presented the MDKC for the membrane shell because it is an important building block in the more modern theory, which we now present. It should be obvious, from this MDKC, we can immediately arrive at an MDWD network, and after applying network transformations, we can get a multidimensional DWN as well.
Next: The Naghdi-Cooper System II
Up: Cylindrical Shells
Previous: Cylindrical Shells
Stefan Bilbao
2002-01-22