 |
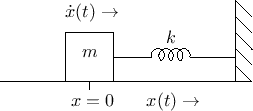
Consider now the mass-spring oscillator depicted physically in Fig.D.3, and in equivalent-circuit form in Fig.D.4.
| |
By Newton's second law of motion, the force ![]() applied to a mass
equals its mass times its acceleration:
applied to a mass
equals its mass times its acceleration:
By Hooke's law for ideal springs, the compression force
By Newton's third law of motion (``every action produces an equal and opposite reaction''), we have
We have thus derived a second-order differential equation governing
the motion of the mass and spring. (Note that ![]() in
Fig.D.3 is both the position of the mass and compression
of the spring at time
in
Fig.D.3 is both the position of the mass and compression
of the spring at time ![]() .)
.)
Taking the Laplace transform of both sides of this differential equation gives
![\begin{eqnarray*}
0 &=& {\cal L}_s\{m{\ddot x}+ k x\} \\
&=& m{\cal L}_s\{{\ddot x}\} + k {\cal L}_s\{x\} \quad \hbox{(by linearity)} \\
&=& m\left[s{\cal L}_s\{{\dot x}\} - {\dot x}(0)\right] + k X(s)
\quad\hbox{(by the differentiation theorem)} \\
&=& m\left\{s\left[sX(s) - x(0)\right] - {\dot x}(0)\right\} + k X(s)
\quad \hbox{(diff.~theorem again)} \\
&=& ms^2 X(s) - msx(0) - m{\dot x}(0) + k X(s).
\end{eqnarray*}](img1784.png)
To simplify notation, denote the initial position and velocity by
![]() and
and
![]() , respectively. Solving for
, respectively. Solving for ![]() gives
gives
![\begin{eqnarray*}
X(s) &=& \frac{sx_0 + v_0}{s^2 + \frac{k}{m}}
\;\isdef \; \frac{r}{s+j{\omega_0}} + \frac{\overline{r}}{s-j{\omega_0}},\quad
{\omega_0}\isdef \sqrt{k/m},\quad\mbox{and} \\ [10pt]
r&=& \frac{x_0}{2} + j \frac{v_0}{2{\omega_0}}
\;\isdef \; R_r e^{j\theta_r},\quad\hbox{with}\\ [10pt]
R_r &\isdef & \frac{\sqrt{v^2_0 + {\omega_0}^2 x^2_0}}{2{\omega_0}}, \qquad
\theta_r \;\isdef \; \tan^{-1}\left(\frac{v_0}{{\omega_0}x_0}\right)
\end{eqnarray*}](img1786.png)
denoting the modulus and angle of the pole residue ![]() , respectively.
From §D.1, the inverse Laplace transform of
, respectively.
From §D.1, the inverse Laplace transform of ![]() is
is
![]() , where
, where ![]() is the Heaviside unit step function at time 0
.
Then by linearity, the solution for
the motion of the mass is
is the Heaviside unit step function at time 0
.
Then by linearity, the solution for
the motion of the mass is
![\begin{eqnarray*}
x(t) &=& re^{-j{\omega_0}t} + \overline{r}e^{j{\omega_0}t}
= 2\mbox{re}\left\{re^{-j{\omega_0}t}\right\}
= 2R_r\cos({\omega_0}t - \theta_r)\\
&=& \frac{\sqrt{v^2_0 + {\omega_0}^2 x^2_0}}{{\omega_0}}
\cos\left[{\omega_0}t - \tan^{-1}\left(\frac{v_0}{{\omega_0}x_0}\right)\right].
\end{eqnarray*}](img1790.png)
If the initial velocity is zero (![]() ), the above formula
reduces to
), the above formula
reduces to
![]() and the mass simply oscillates sinusoidally at frequency
and the mass simply oscillates sinusoidally at frequency
![]() , starting from its initial position
, starting from its initial position ![]() .
If instead the initial position is
.
If instead the initial position is ![]() , we obtain
, we obtain

