Wave digital filters result from the mapping of a lumped analog electrical network (usually made up of the elements mentioned in the previous section connected using Kirchoff's Laws, and which is intended for use as a filter) into the discrete-time domain. In the linear time-invariant case, this translation is carried out using a particular type of spectral mapping between the analog frequency variable ![]() and a new discrete frequency variable
and a new discrete frequency variable ![]() which will be a rational function of
which will be a rational function of
![]() which is interpreted as a unit delay, of duration
which is interpreted as a unit delay, of duration ![]() ; the mapping affects only reactive
; the mapping affects only reactive ![]() -ports, i.e., those whose behavior is frequency-dependent, such as the inductor and capacitor. Memoryless elements, such as the transformer, gyrator and resistor (as well as the parallel or series connection, interpreted as an
-ports, i.e., those whose behavior is frequency-dependent, such as the inductor and capacitor. Memoryless elements, such as the transformer, gyrator and resistor (as well as the parallel or series connection, interpreted as an ![]() -port) are frequency-independent, and will be unaffected by such a transformation.
-port) are frequency-independent, and will be unaffected by such a transformation.
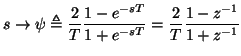
The frequency mapping proposed by Fettweis![]() in [41] is a particular type of bilinear transform, given by
in [41] is a particular type of bilinear transform, given by
 |
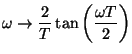
In particular, for a harmonic state--that is, for real frequencies ![]() such that
such that ![]() and
and
![]() , we have that
, we have that
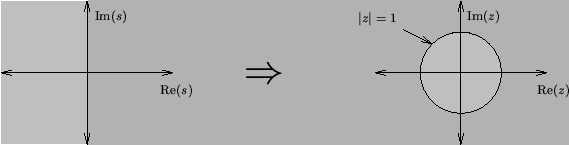
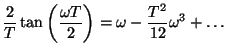
It is also worthwhile examining the mapping (2.11) on the unit circle in the low-frequency limit, in which case we can expand the right side of the mapping about
![]() , to get
, to get
 |
It is important to mention that the time-domain interpretation of the bilinear mapping (2.11) is called the trapezoid rule for numerical integration. That is, treating ![]() as the unit delay, the right-hand side of (2.11) serves as an approximation to the derivative in a discrete-time setting. For example, in the case of the inductor, application of the mapping yields the following difference equation relating the voltage and current:
as the unit delay, the right-hand side of (2.11) serves as an approximation to the derivative in a discrete-time setting. For example, in the case of the inductor, application of the mapping yields the following difference equation relating the voltage and current:
For the rest of this section, so as to avoid unnecessary extra notation, we will assume that we have discrete time voltages and currents. Thus ![]() and
and ![]() now refer to sequences
now refer to sequences ![]() and
and ![]() , for
, for ![]() integer, and the steady state quantities
integer, and the steady state quantities ![]() and
and ![]() are complex amplitudes of a sequence at the discrete frequency
are complex amplitudes of a sequence at the discrete frequency ![]() .
.