In the case of a spring with stiffness ![]() , we have the impedance
, we have the impedance
which gives the reflectance

As before, we may eliminate
under the bilinear transform. So we have the digital reflectance
![$\displaystyle \fbox{$\displaystyle \hat{\tilde{\rho}}_k(z) = z^{-1}$} \qquad\makebox[0pt][l]{(Wave Digital Spring)}
$](img4864.png)
and corresponding difference equation
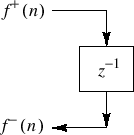
Again the delay-free path has been eliminated. The wave flow diagram is shown in Fig.F.3.
Thus, the WDF of a spring is simply a unit-sample delay, which is just the negative of the WDF mass. If we were to switch to velocity waves instead of force waves, both masses and springs would again correspond to unit-sample delays, but the spring would become inverting and the mass non-inverting.