
A more general linear constant coefficient differential equation can be written as:
or, in the frequency domain, assuming zero initial conditions,
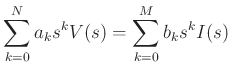
We can define a transfer-function relationship as follows:

where we have normalized ![]() to
to ![]() . Note that
. Note that ![]() is a
rational function of
is a
rational function of ![]() of order
of order ![]() .
.
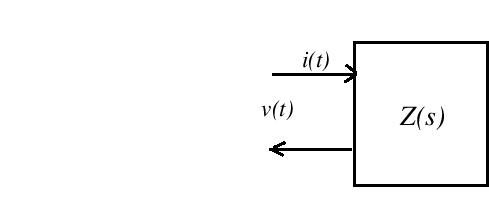
If ![]() and
and ![]() are measured at the same point, then
are measured at the same point, then
![]() is a driving point impedance, as depicted below:
is a driving point impedance, as depicted below:
If the circuit (or mechanical system) is physically passive,
then ![]() must be positive real
must be positive real