Next |
Prev |
Up |
Top
|
JOS Index |
JOS Pubs |
JOS Home |
Search
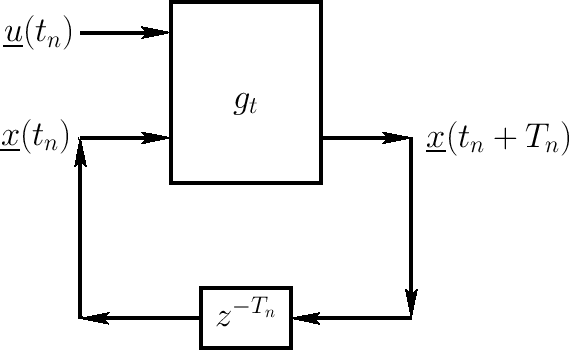
Recall the general state-space model in continuous time:
An approximate discrete-time numerical solution is
for
 (Forward Euler)
(Forward Euler)
Let
![$ g_{t_n}[\underline{x}(t_n),\underline{u}(t_n)] \isdef \underline{x}(t_n) + T_n\,f_{t_n}[\underline{x}(t_n),\underline{u}(t_n)]$](img61.png) :
:
- This is a simple example of numerical integration for
solving the ODE
- ODE can be nonlinear and/or time-varying
- The sampling interval
 may be fixed or adaptive
may be fixed or adaptive
Next |
Prev |
Up |
Top
|
JOS Index |
JOS Pubs |
JOS Home |
Search
Download ReviewPM.pdf
Download ReviewPM_2up.pdf
Download ReviewPM_4up.pdf