| (1) |
| (1) |
We will assume that both ![]() and
and ![]() exist so that we can discuss
measuring them interchangeably. We will further assume that
exist so that we can discuss
measuring them interchangeably. We will further assume that ![]() has finite length so that we can measure the
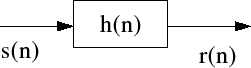
response to an input signal in a finite amount of time. The goal of this
document is to explain how to excite the system with a signal
has finite length so that we can measure the
response to an input signal in a finite amount of time. The goal of this
document is to explain how to excite the system with a signal ![]() , measure the response
, measure the response ![]() , and use
, and use
![]() and
and ![]() to determine
to determine ![]() (and equivalently
(and equivalently ![]() ). In
particular, it is useful to pick a signal
). In
particular, it is useful to pick a signal ![]() that contains a large amount
of energy so that measurement noise will not significantly corrupt the measurement results.
that contains a large amount
of energy so that measurement noise will not significantly corrupt the measurement results.