 |
Measuring the frequency response of a wah pedal is relatively easy because it is a single-input, single-output, analog audio filter, with quarter-inch input/output jacks. A CryBaby pedal16 was hooked up to an input and output of a Gina3G audio interface connected to a Linux PC (Red Hat Fedora 7 distribution) with Planet CCRMA installed. The response measurements shown in Figures 14 through 16 were carried out in pd and Octave17 using software from the RealSimple Transfer Function Measurement Toolbox (RTFMT) [1].18The Octave command-line for generating the test input data (a sine sweep whose frequency increases exponentially with time) was as follows:
generate_sinesweeps(40,10000,48000,2);This specifies a sine sweep from 40 Hz to 10 kHz lasting 2 seconds, with the sampling rate set to 48 kHz. Next, the shell command-line
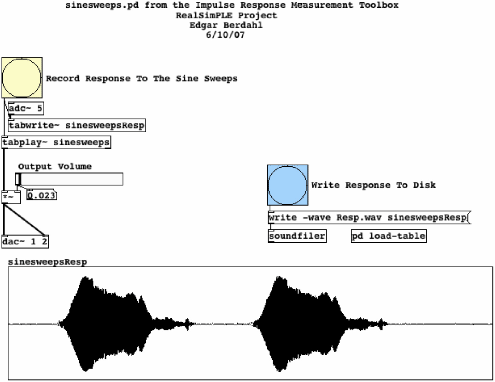
pd sinesweeps.pdopens the pd patch shown in Fig.17. This pd patch (also distributed with the RTFMT) plays the sinesweep and records the response when the button labeled ``Record Response To The Sine Sweeps'' is clicked. The captured sweep-response is displayed so that the ``Output Volume''can be adjusted to achieve a good level. When the level looks good, the captured response is written to Resp.wav by clicking the button labeled ``Write Response To Disk.'' This was repeated for three settings of the wah pedal as described above (min, middle, and max pedal angles).
The captured response is in the form of a measured impulse response. The next step is to convert each of the three measured impulse responses to resonator filter coefficients. There are many ways of doing this [11]. For this exercise, the matlab19 scripts shown in Figures 18 and 19 were used.
f1 = 40; f2 = 10000; % used in filename (can't change)
f1z = 300; f2z = 3000; % zoom-in range (improves estimates)
del = [3000 2000 2000]; % measurement system delay (samples)
dur = [2048 1024 1024]; % impulse-response duration to take
dir = sprintf('wah-2sec-%dHz-%dkHz',f1,f2/1000);
Q = zeros(1,3);
wp = zeros(1,3);
for i=1:3
ifn = sprintf('%s/wah%dImpResp.wav',dir,i-1);
[wahir,fs] = wavread(ifn);
if (del(i)+dur(i))>length(wahir)
error('Signal is too short (less than system delay)');
end
wi = wahir(del(i)+1:del(i)+dur(i));
[Qi,wpi,Hp,Hd,w] = invfreqsmethod(wi,f1z,f2z,fs);
Q(i) = Qi; wp(i) = wpi;
disp('PAUSING - RETURN to continue'); pause;
end
Q % print out estimated Q values
fp = wp/(2*pi) % print out estimated pole frequencies
|