Suppose now that we wish to drive the mass along a frictionless
surface using a variable force ![]() . This is similar to the
previous example, except that we now want the traveling-wave
components of the force on the mass to sum to
. This is similar to the
previous example, except that we now want the traveling-wave
components of the force on the mass to sum to ![]() instead of 0:
instead of 0:
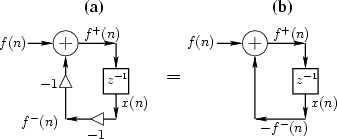
The simplified form in Fig. N.8b can be interpreted as a wave
digital spring with applied force ![]() delivered from an infinite
source impedance. That is, when the applied force goes to zero, the
termination remains rigid at the current displacement.
delivered from an infinite
source impedance. That is, when the applied force goes to zero, the
termination remains rigid at the current displacement.