Next |
Prev |
Up |
Top
|
Index |
JOS Index |
JOS Pubs |
JOS Home |
Search
Forming Outputs
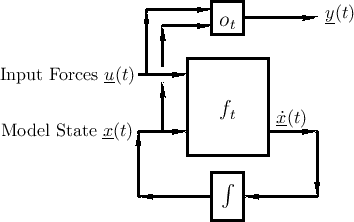
Any system output is some function of the state, and possibly
the input (directly):
The general case of output extraction is shown in Fig.1.5.
The output signal (vector) is most typically a linear
combination of state variables and possibly the current input:
where  and
and  are constant matrices of linear-combination
coefficients.
are constant matrices of linear-combination
coefficients.
Next |
Prev |
Up |
Top
|
Index |
JOS Index |
JOS Pubs |
JOS Home |
Search
[How to cite this work] [Order a printed hardcopy] [Comment on this page via email]
![$\displaystyle \underline{y}(t) \isdef o_t[\underline{x}(t),\underline{u}(t)]
$](img209.png)