 |
This is a musical interface I have been working on since the HCI course I took at CCRMA, Stanford. I started the project together with musician Luigi Castelli (who was also working on a Master at CCRMA) and product designer Eto Otitigbe (who was working on a Master at the PRL of Stanford University). I was responsible for the electronics and software design and implementation. Luigi composed some music for the laser harp and designed custom synthesizers to fit the aesthetic of the harp. Eto designed the mechanical enclosure of the laser harp using SolidWorks. The interface uses laser beams and infrared sensors to sense hand gestures and translates these gestures into MIDI. The laser harp was already used in a number of performances at CCRMA in the US and the Logos Foundation in Belgium. Artist Barbara Buchowiec made a composition for the Laser Harp and performed with it in April 2004 during one of the M&M concerts at Logos. In 2002-2003 we participated in the BizIdee contest for entrepreneurship with this interface. You can find the manual for the laser harp as well as some video material here. The interface will be used in usability research for my PhD. The version you can see at the left is currently at CCRMA, Stanford University, to be used by electronic music performers and composers. | |
|
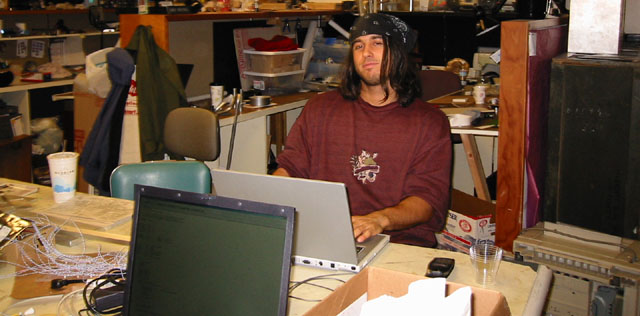
On the right you can see product designer Eto Otitigbe working on the second prototype of the laser harp, around 4am in the morning at Stanford University's PRL. |
 |
|
| On the right you can see Luigi working on a new synthesizer for the laser harp in MAX/MSP |
 |
|
|
|
On the left side you can see the first mechanical design of the laser harp we were planning to build at the time. The wooden box would contain 12 lasers and 4 ultrasonic distance sensors. The top of the laser harp would contain all the phototransistors. Due to the complexity of the design (we were using 3 lasers and were trying to build our own beamsplitters) we abondoned it and decided to build indidivual laser harp modules which would each use 3 lasers and one distance sensor, infrared or ultrasonic. | |
 |
On the left you can see the beam splitters Eto was designing and building using SolidWorks and the computer controlled laser cutter at Stanford's PRL. | |
 |
On the left you can see the history of the Laser Harp at CCRMA in one picture: in total, there were about 6 prototypes we designed and built over a period of about 6 months. It started with a simple mechanical design to see if we could align laser beams to phototransistors (far left, partly hidden in the picture). After that we built two prototypes at the same time, which used an ultrasonic sensor for distance sensing. Laser beams and phototransistors were used to sense the presence of a hand. The laser beams were on the corners of a triangle, because we wanted to map delays between cut laser beams to MIDI information as well. We were facing some stability problems, failing repeatedly to align laser beams to phototransistors over a distance of about 2 meters, until we decided to glue the components in place, which solved the problem. The next prototypes were quite close to the final prototype which you can see in the picture above. The first laser harp prototypes used a Basic Stamp but it was clear that this processor would not be fast enough for our applications. Thanks to a suggestion by Bill Verplank we started using the Atmel AVR microcontrollers in our designs which solved all latency problems. | |
 |
The two first laser harp prototypes using ultrasonic distance sensors. |
 .
. {kind=link}
{kind=link}
{kind=link}