 |
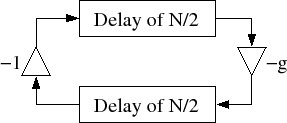
Let's now consider the effect of the damping more precisely. Every time a wave travels
around the digital waveguide, its amplitude ![]() is scaled by
is scaled by
![]() . After
. After ![]() trips around the waveguide, the amplitude is scaled by
trips around the waveguide, the amplitude is scaled by ![]() .
Since each trip lasts
.
Since each trip lasts ![]() seconds, the amplitude is scaled
by
seconds, the amplitude is scaled
by
![]() in
in ![]() seconds. If we let
seconds. If we let ![]() be the time
constant as defined in the monochord laboratory assignment, then we have
be the time
constant as defined in the monochord laboratory assignment, then we have
| (5) |
and so
| (6) |
Finally, we can say that the amplitude of the waves flowing around the
waveguide model ![]() decreases approximately exponentially with time:
decreases approximately exponentially with time:
| (7) |