We will use the simplified physical model of a plucked vibrating
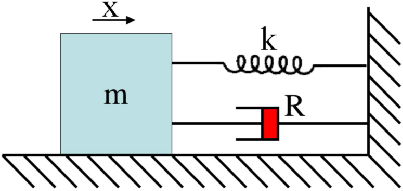
string as explained in the monochord laboratory assignment. Recall that as depicted in
Figure 2, ![]() is the mass in kg,
is the mass in kg, ![]() is the spring constant
in N/m, and
is the spring constant
in N/m, and ![]() corresponds to friction and is measured in N/(m/s).
This kind of friction may for instance be implemented using a viscous
resistance. Since we are studying musical instruments, the decay time
of the displaced mass-spring-damper system will be long enough that
the vibration will be almost periodic. The system may be considered
``lightly damped'', which is the same as having
corresponds to friction and is measured in N/(m/s).
This kind of friction may for instance be implemented using a viscous
resistance. Since we are studying musical instruments, the decay time
of the displaced mass-spring-damper system will be long enough that
the vibration will be almost periodic. The system may be considered
``lightly damped'', which is the same as having ![]() be small. The
be small. The
![]() ,
, ![]() , and
, and ![]() parameters could be fit so that the
mass-spring-damper system behaves like the lowest harmonic of a
vibrating string.
parameters could be fit so that the
mass-spring-damper system behaves like the lowest harmonic of a
vibrating string.
Apply Newton's second law
| (1) |
However, if we implement the feedback law
![]() , then we arrive at the
following differential equation [2]:
, then we arrive at the
following differential equation [2]:
| (2) |
This feedback can be realized physically by using a sensor to measure the displacement
![]() , scaling
, scaling ![]() by
by ![]() , and adding the result to
, and adding the result to ![]() scaled by
scaled by ![]() .
The signal processing can be implemented using simple op-amp circuits, and the
output signal can be fed to a motor that exerts the force
.
The signal processing can be implemented using simple op-amp circuits, and the
output signal can be fed to a motor that exerts the force ![]() . This controlled system is equivalent to a system with friction coefficient
. This controlled system is equivalent to a system with friction coefficient ![]() and spring constant
and spring constant ![]() . As a result, we have
. As a result, we have
 and the decay time constant
and the decay time constant
![]() .
.
If instead we use
![]() , then we have
, then we have
In summary, for a single lightly damped oscillator, ![]() may be used to
alter the frequency of vibration
may be used to
alter the frequency of vibration ![]() and
and ![]() and
and ![]() alter the
damping. Note that integral control
alter the
damping. Note that integral control ![]() will do better at damping
resonances with lower frequencies because integration provides a
frequency weighting by
will do better at damping
resonances with lower frequencies because integration provides a
frequency weighting by ![]() (since
(since
![]() , where
, where ![]() is radian frequency).
is radian frequency).