 |
|
|
The simplest extension of our current digital waveguide model is to use the driving-point admittance of the instrument in a convolutory way. A discussion of what measurements needed to compute the driving-point admittance can be found in Section 3.2.
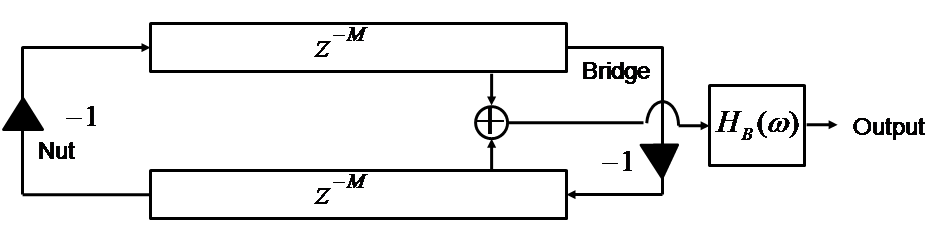
In Figure 18 the output of the digital waveguide is convolved with the driving-point admittance. Since the virtual instrument described up to this point is linear and time-invariant, the driving-point admittance of the instrument can be used to excite the digital waveguide by commuting the admittance with the digital waveguide. Though this is unrealizable in the physical world, the two systems are the same. This method of using the driving-point admittance to drive the digital waveguide is known as commuted synthesis.2