Difference between revisions of "Software Lab NMC"
(→Powering Up For The First Time) |
(→The ccrma@satellite setup) |
||
| Line 17: | Line 17: | ||
- One GT Max adjustable-length USB cable | - One GT Max adjustable-length USB cable | ||
| − | If you are missing something, please go get it before assembling your kit. Use the USB cable to connect the Arduino to the Beagle Board. | + | If you are missing something, please go get it before assembling your kit. Use the USB cable to connect the Arduino to the Beagle Board. Make sure you plug the micro SDHC memory card fully into its seat so that it looks as shown inside the red box: |
[[Image:Kitblank.jpg]] | [[Image:Kitblank.jpg]] | ||
Revision as of 14:00, 1 July 2011
Lab 1: Making Music with Pd in Satellite CCRMA
Lab write-up due on Tuesday, July 12 at 9AM
(For the lab write-up, answer all the questions asked below, and include pd patches of your solutions.)
For this lab you need your [Satellite CCRMA kit], a computer to program it, and some headphones with a mini 1/8" stereo jack. During this lab, you will start to use your kit.
Contents
- 1 The ccrma@satellite setup
- 2 Powering Up For The First Time
- 3 Firmware Programming On Arduino
- 4 Custom Communication
- 5 Low-latency sensing
- 6 Make A Musical Interaction
- 7 Optional: Autonomous ccrma@satellite
- 8 Optional: Programming Linux
- 9 Halt Your Board Properly When Finished!
- 10 Wrap-Up
- 11 Install
- 12 Download the Lab Patches to Your Home Directory
- 13 Play Around With the Patches
- 14 Short questions
- 15 Key Repeat
- 16 Design a different musical interaction
- 17 The Community
The ccrma@satellite setup
Included in your kit you should have
- Satellite CCRMA Hardware (Beagle Board + microSDHC memory card + Arduino Nano + solderless breadboard) - One 5V power adaptor to plug into the Beagle Board - One Ethernet cable for external communication - Arduino Nano - One GT Max adjustable-length USB cable
If you are missing something, please go get it before assembling your kit. Use the USB cable to connect the Arduino to the Beagle Board. Make sure you plug the micro SDHC memory card fully into its seat so that it looks as shown inside the red box:

Powering Up For The First Time
Plug the Ethernet port of the Satellite CCRMA into your laptop. Then plug in the 5V power supply into the Beagle as shown below. You should see some lights turn on, flickering every now and then. This means that Satellite CCRMA is booting up.

Connect To Satellite CCRMA
In order to see what your Satellite CCRMA kit is doing and program it, you need to log in to it. To do so, follow these instructions.
Avoid Powering Down the Board Without Halting it First!
Would you take the battery out of your laptop and unplug its power adaptor without shutting down? I don't think so! The same goes for ccrma@satellite because it is a small computer running linux. If you power if off without shutting down, then you can corrupt the files on the SD card, which in the worst case could cause it to stop booting up anymore, and we would have to burn you a new SD card! So just remember this: HALT ccrma@satellite BEFORE DISCONNECTING IT FROM ITS POWER!
Now we will test the halt procedure. Run the halt command as superuser by typing sudo halt at the ccrma@satellite prompt. Then you will again have to type in the password temppwd in order to have the privilege to run this command. The SSH connection will be closed, but it will still be 20 seconds or so before ccrma@satellite has completely shut down. (Note: The command sudo reboot would instead have caused ccrma@satellite to reboot itself.)
Wait an extra entire minute to ensure that ccrma@satellite is shut down. However, it will not power itself off. To do this, you need to disconnect the 5V power adaptor from the hub.
Getting Comfortable With ccrma@satellite
Turn on ccrma@satellite again using the same procedure as before where you plug the power into the USB hub. After about 30 seconds, the board should be booted up again, so you can log in again by running the command
ssh -X ccrma@192.168.1.105
If you list the device directory, you can see which devices are attached to linux. Type
ls /dev
to get an idea. Wow, there are so many! To list the devices with serial interfaces type
ls /dev/tty*
Once of these devices should be /dev/ttyUSB0 for the Arduino Nano. If you do not see this one, then try rebooting using sudo reboot to see if that fixes this problem. (If you reboot, this will take about 45 seconds, and you will have to login again using ssh. If that doesn't work, come talk to us. If you are a linux pro, you can try to debug the problem yourself by typing dmesg and looking at the result.)
Firmware Programming On Arduino
Compiling and uploading firmware code in the Arduino Program
For this class, we assume that you will be adapting existing working code for your own applications. While this is certainly easier than writing firmware from scratch, it does require understanding how existing code functions.
Start the Arduino software by typing the command arduino & in the terminal. Please upload the following firmware programs from your Arduino program's Examples folders to your Arduino controller and see how they function. Do attach LEDs, buttons, as is appropriate:
* Examples->Digital->Blink * Examples->Digital->BlinkWithoutDelay * Examples->Digital->Button (Even though it works, there is a bug in this file. In the text file that you submit to us * answering questions for this lab, tell us what the bug is.)
Custom Communication
Another reason that you might want to program the Arduino microcontroller even if you are connected to a laptop or desktop computer is to enable greater control over the communications from the Arduino. In this segment of the laboratory, we learn a wider variety of ways to send data from the Arduino hardware to the computer than we have previously used.
Serial communication with the Arduino software
You might have noticed in the previous lab segment that it can be very hard to know what is going wrong when the Arduino hardware is in autonomous mode. Here, we send serial communications between the Arduino hardware and the Arduino software.
- Examples->Analog->Smoothing: Use the Serial Monitor (icon on the far left on the Arduino software toolbar) to get data back from the Arduino.
- Examples->Communication->SerialCallandResponse.
Serial communication with PD
Now let's try using serial to communicate with PD.
First let's try outputting information to the Arduino hardware:
- Load Examples->Communication->PhysicalPixel
- The PD patch for communicating with this firmware is already stored in your ~/250a/lab3 directory (or you can try to get it from here and then upload it to ccrma@satellite using scp, but that would be harder :)
Next let's try getting information from the Arduino hardware:
- Load Examples->Communication->Graph
- The PD patch for communicating with this firmware is already stored in your ~/250a/lab3 directory (or you can try to get it from here and then upload it to ccrma@satellite using scp, but that would be harder :)
Low-latency sensing
Encoder input
One final reason that you would want direct control over the Arduino firmware is that you might have very low-latency sensing needs. As an example of this, we show you here how to use encoder input with the Arduino.
Quit Pd to ensure that Pd isn't using the USB/serial connection to the Arduino. Change to the ~/250a/lab3/encoder directory by typing
cd ~/250a/lab3/encoder
(If you are having problems with the Beagleboard and doing this lab on your laptop, download encoder.zip).
in the terminal. Start up the Arduino software using the command arduino & and upload the sketch encoder.pde to the Arduino. Then quit the Arduino software and start up Pd by typing pd encoder.pd You will notice that the comport object, which controls the USB/serial connection, has a dotted red box around it and that a related error is shown in the Pd main window. To correct the error, you need to rename the object from flatspace/comport $1 9600 to comport $1 9600.
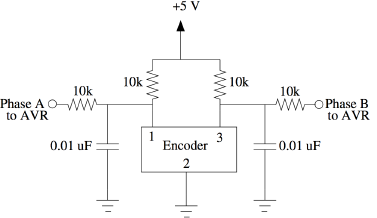
Now you need to build this schematic to interface the encoder: http://cm-wiki.stanford.edu/mediawiki/images/c/c1/Encoder_filter.png. Pin two is the middle pin on the rotary encoder, and pins 1 and 3 are the other directly adjacent pins. It can be a bit difficult to plug the encoder into the solderless protoboard, but you can do it if you straighten out the pins first.
{kind=link}
Note: In the schematic, AVR Phase A is digital pin 2 or the Arduino, and AVR Phase B is digital pin 3.
Now you're ready to send out the position of the encoder over the serial bus. The values should start near zero and increase or decrease, depending on which direction you turn the encoder. How are negative numbers represented? Why does the encoder always start near 0 when the program on the Arduino is restarted?
Make A Musical Interaction
As the final main deliverable of the lab, you should cause your ccrma@satellite kit make some sound that depends on how you manipulate the sensors. For example, you could make a musical instrument, a music controller, a mock-up sound art installation, or some other sonic interaction. Now that you have had some experience synthesizing sound, your sound synthesis patch should involve more than just a few osc~s. Think about what you want to design before you get started.
For your musical interaction, you can write your own firmware, or you can use Firmata. If you choose to use Firmata, then you need to re-flash Firmata to the beagleboard. To do so, first load the Arduino software. Then load the StandardFirmata sketch by choosing File|Examples|Firmata|StandardFirmata. Make sure that you have the correct Serial Port and Board selected. Then upload StandardFirmata to your Arduino Nano by clicking on the Upload button. Check that there were no errors with uploading StandardFirmata before you quit the Arduino software.
Start up the Jack audio server by executing the command qjackctl & at the terminal and clicking on the Start button. In order to be able to hear audio, you will need to plug a pair of ear buds, headphones, or loudspeakers into the 1/8" (2.54mm) jack labeled AUDIO OUT on the beagleboard.
It is probably easiest to make your patch by modifying ~/on-startup/windy-day.pd, which Edgar demonstrated in class. To start it up, first change to the directory ~/on-startup by typing cd ~/on-startup in the terminal. Then type pd windy-day.pd & to startup pd.
Optional: Autonomous ccrma@satellite
By this point you should be done with your musical interaction. If you would like to go the extra mile, we will now show you how to make your musical interaction autonomous in the sense that it can operate all by itself, free from any external laptop computer. We will show you how to do this using the example windy-day.pd.
To Enable A Default Patch On Boot
In the terminal, change to the on-startup directory by typing
cd ~/on-startup
and type ls -la to see what files are in there. You can see that the link (aka alias) default_patch.pd points to windy-day.pd. In order to enable the default patch to load on boot, rename the file load_default_patch_disabled to load_default_patch using the command
mv load_default_patch_disabled load_default patch
The cat command can be used to display the contents of any ASCII file. To look at the contents of load_default_patch, type cat load_default_patch. As you can see, it starts up Jack using the text-based jackd instead of qjackctl, and then it loads default_patch.pd in pd with the graphical user interface (GUI) disabled.
Now your kit should be ready for autonomous ccrma@satellite. To test it, just reboot the kit by typing sudo reboot and entering the password temppwd. As it is rebooting, plug a pair of ear buds, headphones, or loudspeakers into the 1/8" (2.54mm) jack labeled AUDIO OUT on the beagleboard. Within about a minute, your kit should be fully rebooted. To check this, you can try logging in with SSH. Either way, it should start running windy_day.pd upon startup.
Once your kit is fully rebooted, if you touch the anaog input pins on the Arduino A0-A7, it should start making some sound. However, unless you connect up a sensor circuit to some of the analog inputs, the exact behavior may be complicated. In particular, it will depend on the electrical properties of your body (how much sweat is on your fingers, whether you are touching a grounded device such as a laptop with any part of your body. Ask for help if you cannot get any sound.
Finally, log back into ccrma@satellite using the same command as always ssh -X ccrma@192.168.1.105. Type ps -A at the prompt to get a list of the currently running processes. jackd is the Jack audio sound server, and pdextended is the pd process. To stop the default patch from running, type ./stop_default. To see how stop_default works, type cat stop_default. (The ./ was necessary in order to run the script stop_default because the current user directory ~ is not in the user path, so linux needs the ./ to indicate to look for stop_default in the current directory.)
Optional: Programming Linux
We don't actually expect you to do anything here, we are just providing some more information that is maybe helpful for you linux gurus. Since ccrma@satellite runs ubuntu linux on an OMAP chip, many standard software packages have been compiled for it. This is why we were easily able to install software such as Jack, Audacity, ChucK, Faust, Jacktrip, and the Arduino software.
If you are lucky, you can install your favorite software using the apt-get utility. To get a list of packages available on the OMAP's ARM architecture, type
sudo apt-cache pkgnames
You will notice that this list is way too long to look at. You can pipe it to the text file using the command
sudo apt-cache pkgnames > packages.txt
and then look at it using emacs packages.txt, or you search for a particular package, such as
sudo apt-cache pkgnames | grep emacs.
Or, you can compile linux software yourself on the Beagleboard. The gcc, g++ tools etc. are already installed.
Type the df command. You can see that there is not a whole lot more than 1GB available on the SD card, so you should only install software if you decide that you need it.
Halt Your Board Properly When Finished!
Remember to shut down your board when you are done before powering it off! (Of course as Spencer pointed out, if you are operating truly autonomously, of course you cannot login and run the halt command. Nevertheless, if it is not too inconvenient please try to shut down properly if you can. If you do not, then you may find that your SD memory card becomes corrupted.) As described above, you can do this by executing the command sudo halt and then waiting 30 seconds before disconnecting the power cables.
Wrap-Up
Instead of submitting your actual pd patch (because this is a little bit involved), it is okay to simply include some text in your email to Ed and Wendy describing what your patch did. Also please write a few sentences about what part of the lab was the most difficult, and please document any bugs that you find so that we can fix them! In fact, we may add some troubleshooting sections to the bottom of this Wiki.
Thanks so much! We are looking forward to seeing demos of your musical interactions at the beginning of the next lab session!
Install
If you will use your own laptop, install Pd extended v0.41.4. Make sure that you install the extended version so that you have all of the objects that you need.
If you're running Pd using a desktop machine on the CCRMA network, make sure that you followed the instructions in this lecture for configuring Pd.
Download the Lab Patches to Your Home Directory
- Download the patches into your 250a directory and uncompress the archive: software_lab_pd.zip
Play Around With the Patches
- Open the patch labeled myinstrument. Play around with this patch. You should be able to exhaust its musical potential in a matter of minutes; reflect on its strengths and limitations.
- Also try to understand how it works as a piece of software. (But please don't get hung up on the arcana - as always, if you get stuck, ask for help rather than waste time.)
Documentation
- Right-click or option-click on any object to get a contextual menu including "help," which opens that object's help patch.
- Right-click on a blank portion of a Pd patch. Now when you select "help" you get a list of Pd's built-in objects, arranged by category.
- In the upper right hand corner of each Pd window is a "help" menu. This accesses the Pd tutorials as well as some online reference documentation.
Short questions
Why is the following patch a bad idea?

Make a patch that shows how to connect some objects together to calculate the function 1-x where x is an input number. Save the patch in a file called OneMinus.
Key Repeat
- What happens when you hold down a key? The behavior may depend on what operating system you are running.
- Is the behavior desirable on your system? What operating system are you running?
Design a different musical interaction
Here are some ideas of changes that might make the patch more interesting:
- Involve more QWERTY keys
- Involve the mouse (see the [MouseState] object)
- Load in a larger collection of samples.
- Implement a mechanism to switch among banks of samples
- Multiple gestures to one result: design a way for the parameters of each triggered note to depend on multiple key presses. For example, maybe only the space bar triggers notes, and all the other keys determine parameters of notes.
- Make your patch automatically generate a bassline as a function of the key presses
- Set multiple parameters modally, as volume works in the sample patch
- Use chording: keep track of all the keys that are currently pressed, and use only that information to set the parameters for each note.
- One gesture to multiple results
- Use the "metro" object to trigger a steady stream of notes. Now you have two new parameters: repetition rate, and whether the metro is on or off.
- Use the "counter" object to step through a cycle (of samples, parameter settings, etc.)
- You could combine "metro" and "counter" to build a rudimentary sequencer that can step through a rhythmic pattern
- Invent a mechanism to record short sequences of keypresses and play them back in time.
- Incorporate looping or other interactive controls over the soundfile playback
- Use Pd's "spigot" object to route control information to different parts of your patch at different times
- Use some additional signal processing such as a filter, delay line, reverb, tremolo, etc. This gives you more parameters to control.
- Polyphony: make it so the patch can play multiple samples at the same time. (Hint: put multiple copies of "play-sample" in your patch)
- Use a totally different form of sound synthesis, such as FM, granular, or physical modeling.
We recommend that you pick one or a small number of these and work on it in depth, iterating on both the program/test/debug cycle as well as the design/implement/play cycle to craft something that has actual musical potential or is at least more fun to play. If you have an existing idea for your class project, you could use this lab to start thinking about implementing some of the modes and mappings. By all means, if you're inspired to try something else, go for it. If you'd rather spend today getting more of a broad sense of Pd's capabilities, feel free to work on many of these suggestions.
The Community
There is a large, dedicated, and very generous community of Pd users on the Internet. Do some web searching (e.g., with a search engine, or else starting from some more specific resources) and look for interesting externals and/or patches. Download, install, and play with at least one. Can you incorporate it into what you programmed in the previous part?
For more help in finding resources, don't forget to look on the PID Links page.