Kalichord
Contents
The Kalichord: An Electro-Acoustic Plucked String Model Controller
Daniel Schlessinger Music 250B Project Wiki March 18th, 2009

Overall Description
For my 250B project, I extended upon my 250A mini-instrument which I call the Kalichord.
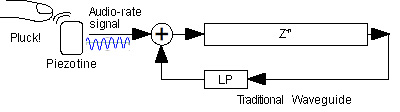
The right hand plucks piezo tines that are fed directly, at audio rates, into a physical model. The left hand plays basslines, using an array of momentary switches (aka buttons, for those who prefer clarity over tech-speak). There is a third degree of freedom that comes from either sliding the hands horizontally (first prototype) or rotating the two halves (second prototype). These motions are mapped to various things such as pitchbend, register changes (ie moving up or down an octave), distortion, virtual pluck position, or perhaps even more physical parameters or note variations!
Here is an diagram of the flow of sound/control:

Photos
Here is the original prototype, from 250A:
 The Original Prototype. Mmm, boxy
The Original Prototype. Mmm, boxy
 The New Prototype. Different, no? Much more pod-like, now.
The New Prototype. Different, no? Much more pod-like, now.
I kind of think it looks like a bird of prey, although that was not the original intent.
Plucking
The novel aspect of the Kalichord is that the audio from the piezo tines is fed directly into a physical model of a string, for a tight coupling between the physical control and the modeled sound:
Improvements Made This Quarter:
Construction
The first, most obvious improvement is the construction - the frame is now made of wood, with cutouts for where the buttons and piezos live. In order to allow for various design changes without killing the overall construction, the sensors themselves are attached to foam board, which is in turn attatched to the wood.

Inter-Hand Motion
New and improved is the inter-hand motion, which went from sliding side-to-side to rotating. The rotational motion comes from a rotary pod, which has a rotational range of 270 degrees.
Point-Navigation System
As in, the thing has a curvy point on each half, making it looks like the head of a bird. Functionally, it lets you know when the instrument is rotated in home position.
Extra Buttons
There are now 21 buttons by the left hand, which is way too many. There are 12 by the thumb, corresponding to all 12 tones of the chromatic scale. The re are 2 buttons each for the first three fingers, corresponding to various common bass notes. There are 3 pinky buttons, which are for changing modes.
 Notice the cool new bass buttons! All 21 of them!
Notice the cool new bass buttons! All 21 of them!
There is also a large button by the thumb piezo in the right hand, for engaging things like pitch-bend or tone damping. You also may have noticed that while most of the buttons are flat and black, there are a couple that are tall and also white. Since the buttons are at different heights, this enables the player to feel for the tall buttons so that they know which buttons are which without looking. Smart, no?
 The Thumb Button
The Thumb Button
Extra Piezos Another new feature is the extra piezos - the first prototype had only four, this one has eight. More piezos, more notes, it's that simple.
 Thumb Button and Piezo Area
Thumb Button and Piezo Area
The Egg
Now featured in the Kalichord, an egg-shaped grip. Mmm, it's making me hungry.
 It's a bird! It's an egg! And now it has 8 piezo strings!
It's a bird! It's an egg! And now it has 8 piezo strings!
Ported to Arduino
For space reasons, the Kalichord now is using the Arduino microcontroller instead of the AVR from 250A.
Ported to Max/MSP
Though the features of Max/MSP have not been fully utilized, I anticipate that the ease of use of Max/MSP will help immensely over the older PD patch.
Future Work
There is still so much to do! For starters, there is much work to be done on the mappings, which are still not perfectly intuitive. Secondly, the construction needs work; it's currently a little flimsy and there's a hideous scratching sound when you rotate the 2 sides due to interference of some of the cables that unfortunately need to travel from the right side to the left. And, I still want to put on the beloved damper-FSR sensors on each tine, so that they are able to register when you're touching the tine, and thus dampen the virtual string.