Feedback control is the discipline in which system dynamics are studied and altered by creating feedback loops. It is applied in many different fields such as electrical engineering (circuit design), chemical engineering (process control), and mechanical and astro/aeronautical engineering (e.g. consider flight and propulsion systems, cruise control).
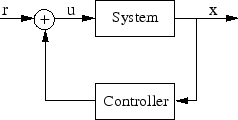
The block diagram for applying feedback control to a system is shown in
Figure 1. This could be the block diagram for a cruise
controller, where the car's velocity ![]() would be driven to a target velocity
would be driven to a target velocity
![]() .
. ![]() would be the rate at
which gasoline were combusted, and
would be the rate at
which gasoline were combusted, and ![]() would be how far the gas pedal were
pushed down by the driver. When no control were applied (i.e.
would be how far the gas pedal were
pushed down by the driver. When no control were applied (i.e. ![]() ), certain system dynamics
would describe the car's velocity
), certain system dynamics
would describe the car's velocity ![]() as a function of the gas
as a function of the gas ![]() . A physical
model describing this relationship could be developed and inserted into the block
labeled ``System'' (see Figure 1). A simple physical model would probably assume that the
road were flat, while a more accurate physical model would also take the
steepness of the road into account. Either way, control theory could be used to derive
appropriate contents for the ``Controller'' block in
Figure 1 so that the composite,
controlled system would behave in an altered, preferred manner.
. A physical
model describing this relationship could be developed and inserted into the block
labeled ``System'' (see Figure 1). A simple physical model would probably assume that the
road were flat, while a more accurate physical model would also take the
steepness of the road into account. Either way, control theory could be used to derive
appropriate contents for the ``Controller'' block in
Figure 1 so that the composite,
controlled system would behave in an altered, preferred manner.
Figure 1 could just as well describe feedback control of a vibrating string. Here the ``System'' block would describe the vibrating string dynamics, and ``Controller'' would describe the electrical circuit connected between a string vibration sensor and string actuator.